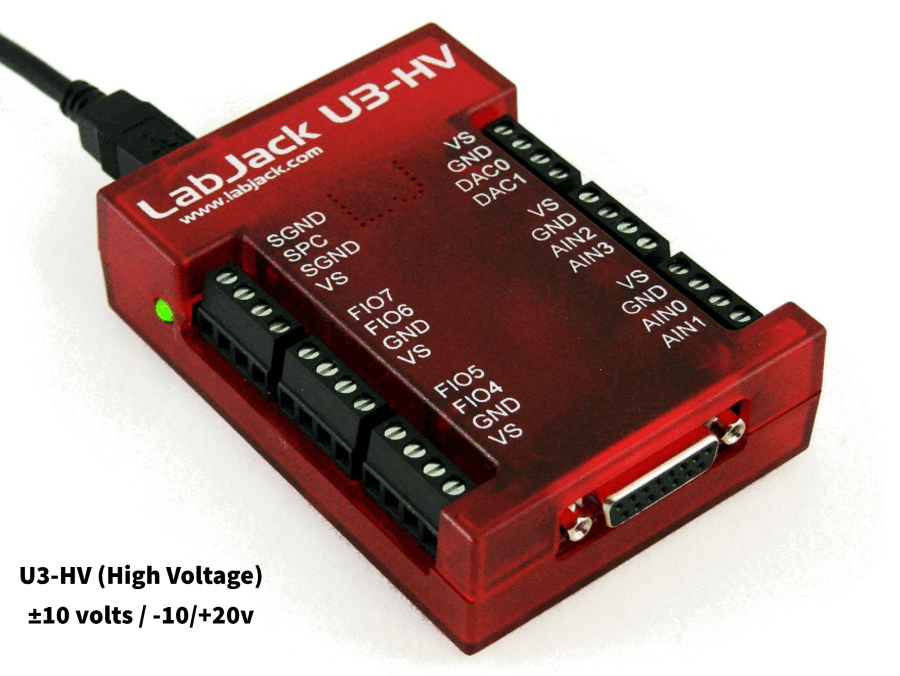
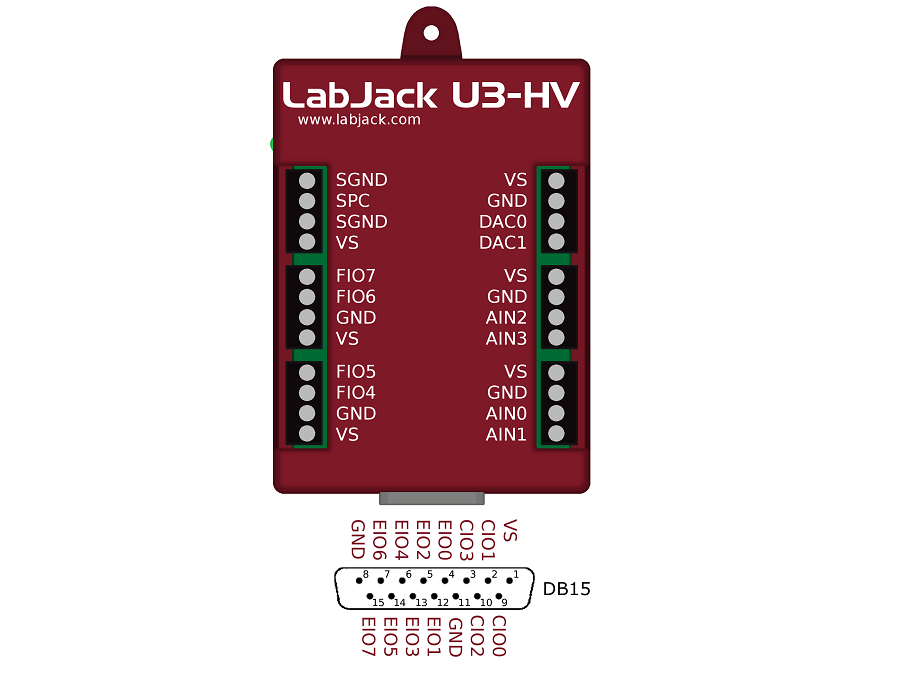










LabJack U3-HV
USB DAQ device with 4 dedicated ±10V, 12-bit analog inputs, 12 flexible I/O, and 4 dedicated digital I/O. The flexible I/O can be configured as either digital or analog, thus providing up to 16 analog inputs, or up to 16 digital I/O. It also has two 10-bit analog outputs, up to 2 counters, and up to 2 timers.
USB Multifunction DAQ
The U3 family devices are versatile for measurement and control within simple analog and digital systems. With the option to configure I/O as either analog or digital, you have flexibility when choosing sensors for your application. Common applications include hobbyist projects, educational programs, industrial control and monitoring, and prototype development.
U3-HV ±10 volts or -10/+20 volts
U3-LV (Low Voltage) 0-2.4v and/or 0-3.6volts
USB Only Customers needing 16+-bit Analog Inputs should consider the Labjack U6 and customers needing Ethernet or onboard scripting abilities should consider our T-Series devices.
Stock status: In Stock
Stock status: In Stock
Compact Yet Powerful, Affordable, Expandable, Multifunction DAQ
USB DAQ device with 4 dedicated analog inputs
12 flexible I/O, and 4 dedicated digital I/O.
Two 10-bit analog outputs, up to 2 counters, and up to 2 timers.
Maximum input stream rate of 50kHz (depending on resolution)
Industrial range (-40 to +85C)
Serial protocols: SPI, I2C, and more
Capable of command/response times less than 1ms

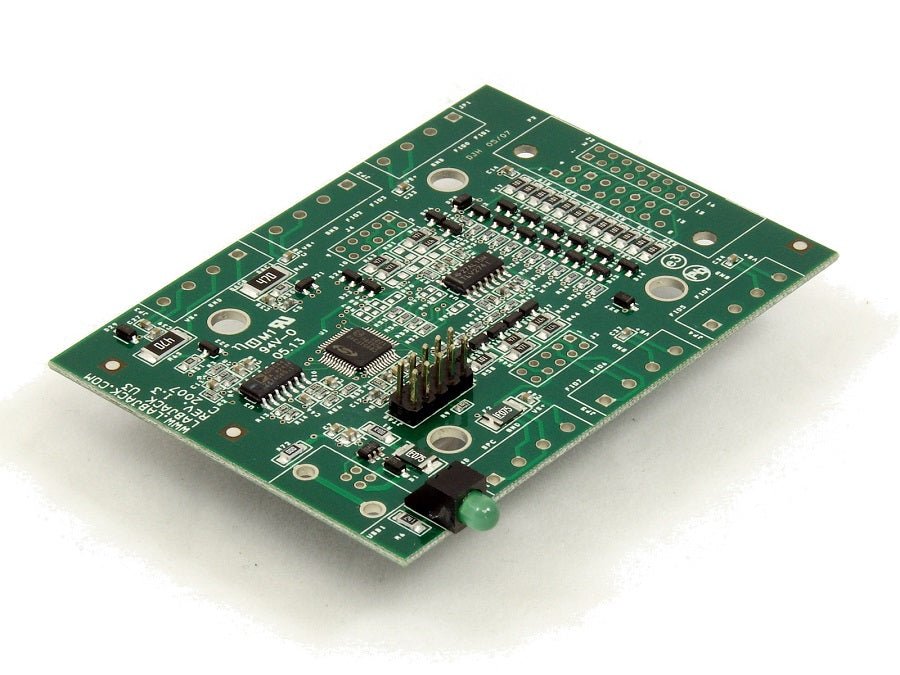
Hardware Overview
Product Highlights
Support Resources
U3 Craftsmanship
Small, Powerful, Flexible

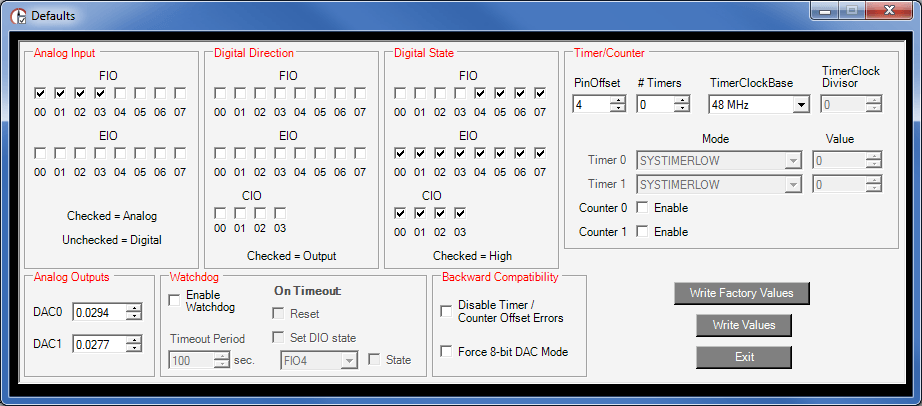
Digital to Analog Outputs-DAC
The LabJack U3 has 2 analog outputs (DAC0 and DAC1) that are available on the screw terminals. Each analog output can be set to a voltage between about 0.04 and 4.95 volts with 10 bits of resolution.
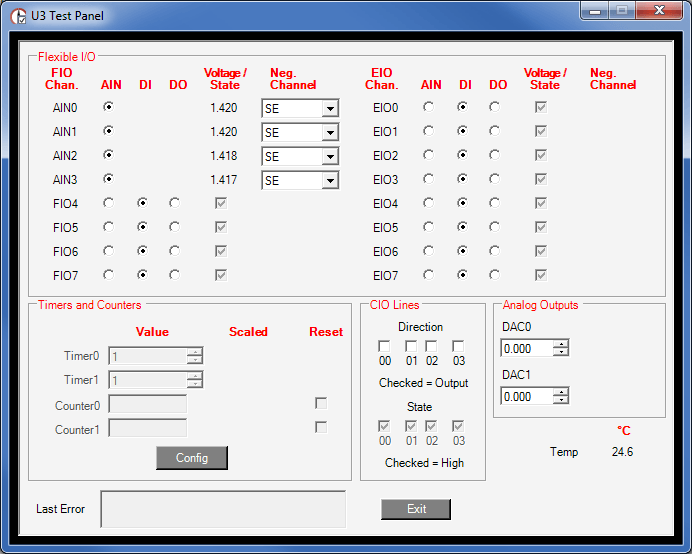
Explore moreFlexible Configurable I/O
The FIO and EIO ports on the LabJack U3 can be individually configured as digital input, digital output, or analog input.
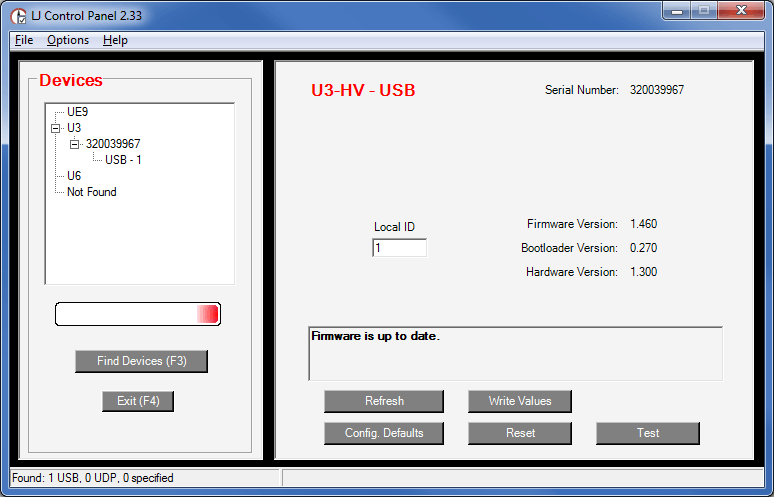
Explore moreUSB Connection to Your Computer
The U3 has a full-speed USB 2.0 connection compatible with USB version 1.1 or later. This connection provides communication and power (Vusb). USB ground is connected to the U3 ground (GND), and USB ground is generally the same as the ground of the PC chassis and AC mains.
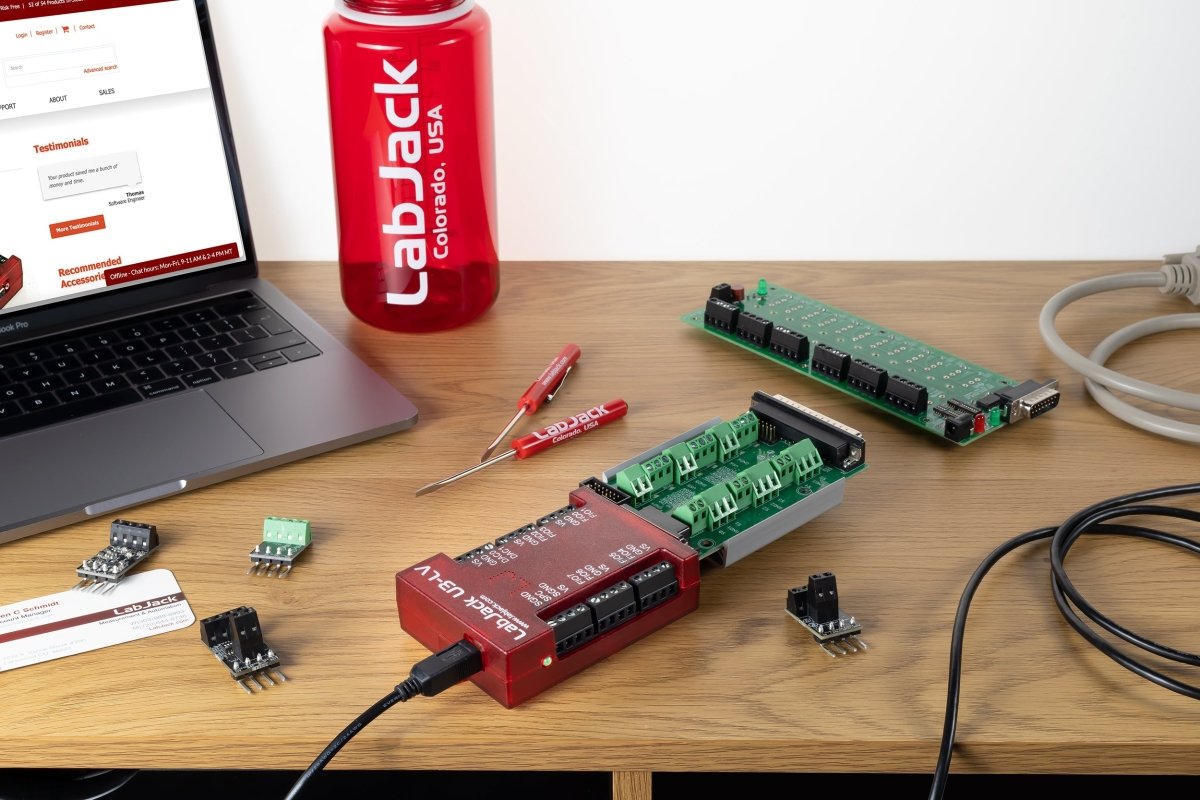
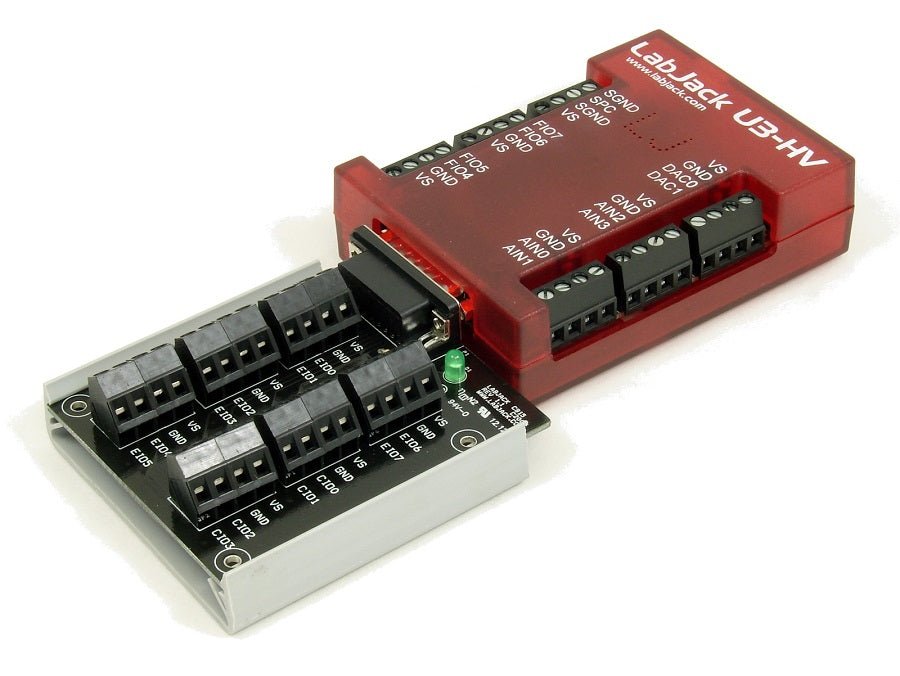
Explore moreConvenient Modules for almost Any Signal
LabJack offers 12 different "Ticks" to simplify data acquisition. They are affordable, easy to install and greatly expand the sensors a LabJack can read.
Explore moreDB15 Connector-Expansion When You Need It
The DB15 connector brings out 12 additional I/O. It has the potential to be used as an expansion bus, where the 8 EIO are data lines and the 4 CIO are control lines.
Explore more