
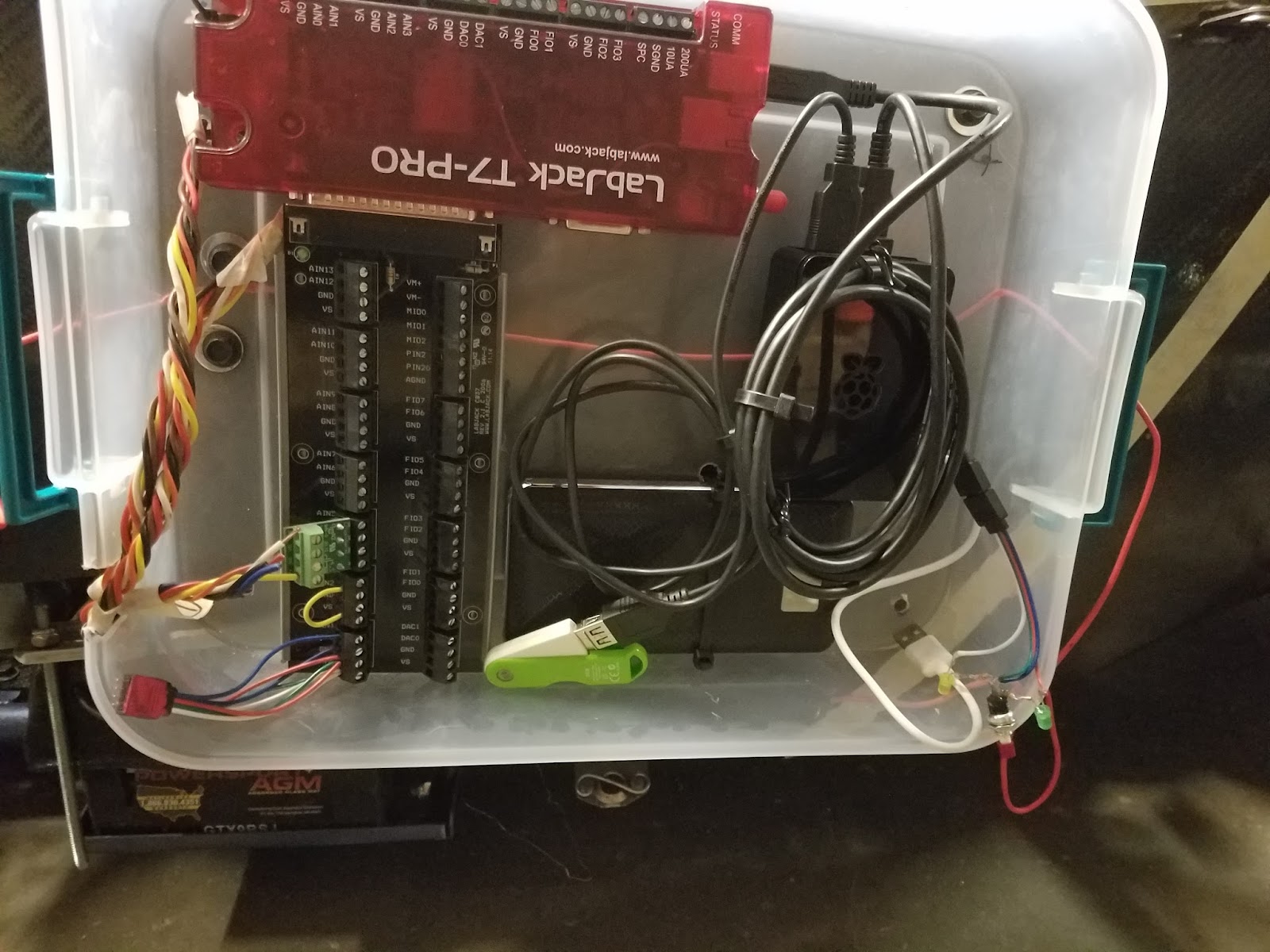
This is a good example of how LabJack devices can be integrated with a single board computer to make a powerful & expandable system in very little time. LabJack donated an entire DAQ bundle to the Colorado School of Mines Formula SAE team in 2017. The team competes in the Formula SAE regional competition in Nebraska every June, where score is based upon a variety of factors including cost, fuel efficiency, and most importantly, performance in events such as autocross (timed laps on a road course), skidpad braking, acceleration, and an endurance race. The LabJack was used to measure a variety of sensors:
In-Stock LabJack Devices
Explore LabJack Collection- Strain Gauges: Gauges were placed in 4 different locations in the chassis. This was used to validate the modeling done through various CAD programs, and to provide important data on the fatigue of the chassis components. Future plans include adding gauges to the suspension A-Frames. Observing the stiffness of the chassis allows the team to tune the suspension properly.
- I2C Accelerometers & Gyroscopes: Using the built-in Lua script functionality of the T7-Pro, as well as the Lua script libraries, implementation of multiple 6 Degree of Freedom IMUs (Inertial Measurement Units) will not be difficult. The sensors will be installed on the car shortly, on the end of the suspension A-Frames, allowing precise measurement of the travel of every wheel on the car. A fifth IMU will be installed near the center of the car, allowing the movement of the car while cornering to be observed and tuned to a very high level of precision. (Dive deep into I2C with LabJack's T-Series tutorial)
- Linear Potentiometers: These were placed inline with the shocks of the car. The data from these potentiometers was used to analyze the loading of each wheel as the vehicle corners, brakes, and accelerates. Read LabJack's potentiometer App Note
All of the analysis here will be used in the design of the vehicle for next year, in June 2017. This will allow weight to be minimized and the suspension to be tuned to the optimal level of performance for the specific track. In addition, a unit will also be installed on the new car, allowing for the best tuning possible.
A Raspberry Pi 3 single board computer was used to log/record the data from the LabJack. A python script was configured to run at startup on the Raspberry Pi. The script connected to the LabJack via LJM, logged register data, and saved the data to a flash drive in a .txt file. The flash drive also contained a config.txt file, which the script used to set analog resolution, the delay between logs, and which registers to log. The Raspberry Pi was powered by a 5v USB Power Bank, but will soon be powered by the electrical system onboard the car.


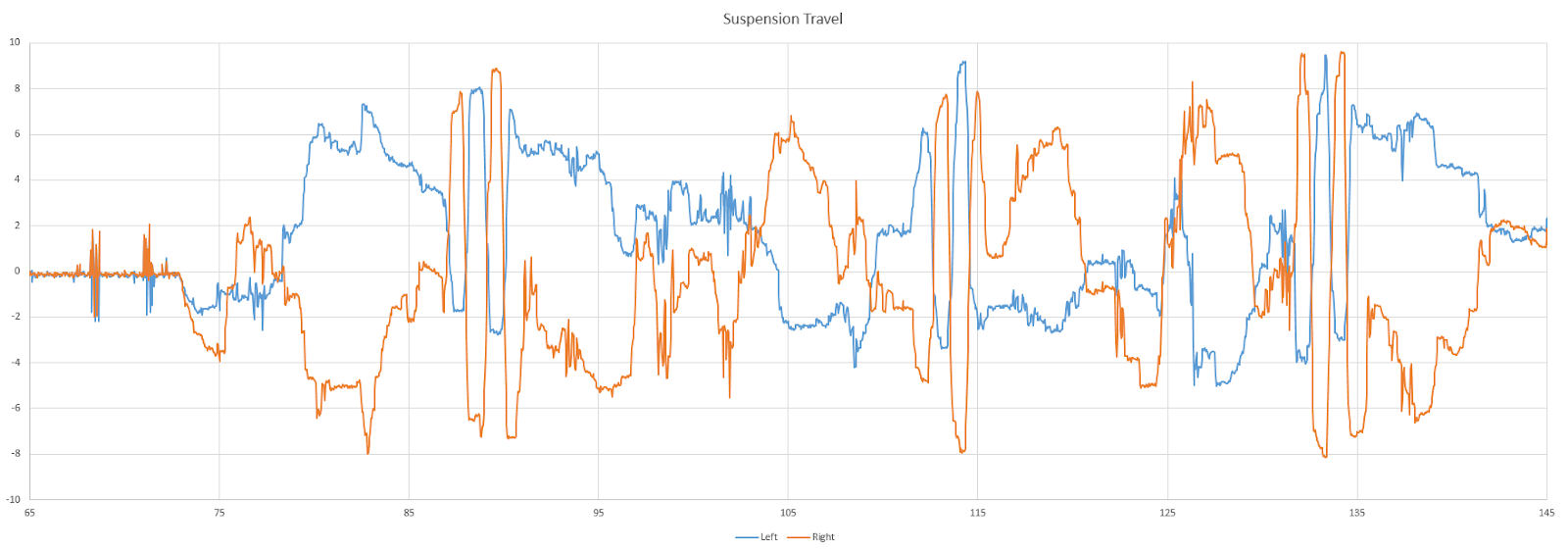
Graph of the suspension travel while driving a slalom course.
Old System- Overview
- AIM-Evo4 Data Acquisition module specialized for automotive use
- Analog inputs are hard to use due to odd connectors
- Often requires amplifiers or voltage dividers for simple sensor use
- Not I2C/SPi Capable, which was required to implement external accelerometers
- Logs CAN-Bus data
New System- Overview
- Onboard single board computer, Raspberry Pi 3, for easy development
- Data will be stored on a removable USB flash drive
- Wireless Remote Monitoring
- This functionality is capable through the LabJack’s built-in USER_RAM registers. The data from the CAN Bus, acquired through the CAN Bus shield on the Pi
- Allows for live monitoring of data (With <100ms delay)
- Works while car is driving
- Wireless communication established by a router onboard the car
- Allows for easier use of the entire DAQ system
- Automatically generated graphs
- More screen space
- No physical connection to the car required
- Monitors all data from both ECU and LabJack
- Data is published to User_RAM by the onboard computer and retrieved by the external laptop through the LabJack’s ethernet capability